好品质 选美高
世界500强企业供应商

多年行业经验
提供行业咨询
多种式样可选
接受式样定制
出口多国经验
具有独立出口权
查看更多
产品中心








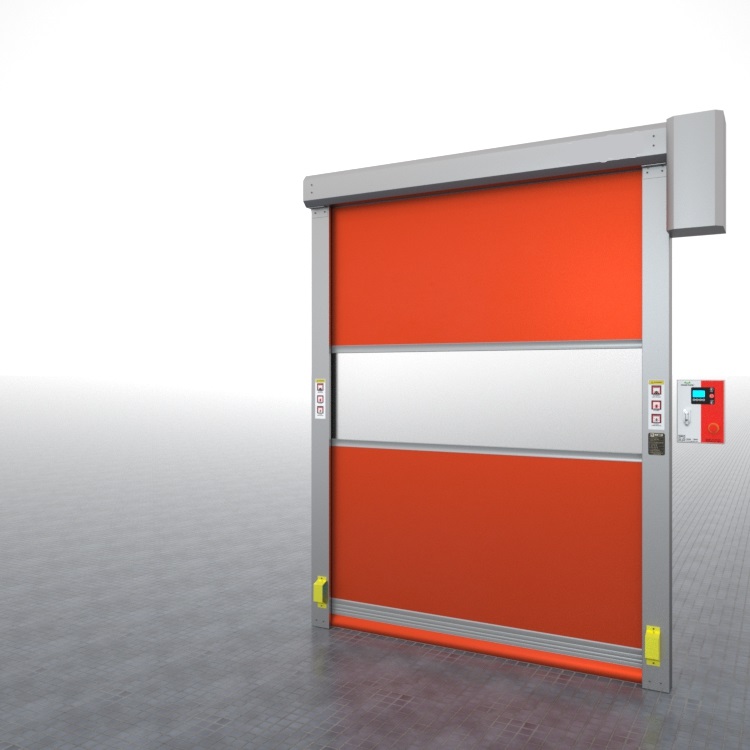
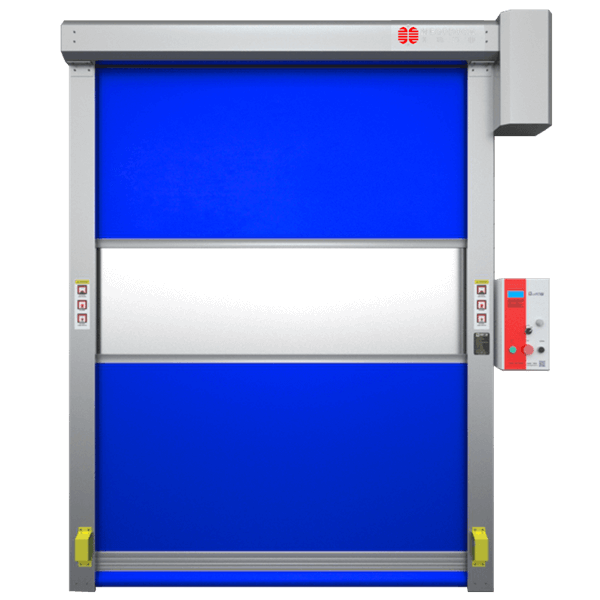
防尘、密封
快速卷帘门

抗风、保温
硬质快速卷帘门

抗风、美观
电动提升门

查看更多
新闻资讯
可与货梯联动的快速卷帘门:美高门业智能联动解决方案

在现代化工厂和仓储物流系统中,楼层间的物料运输是生产流程中的关键环节。许多企业面…
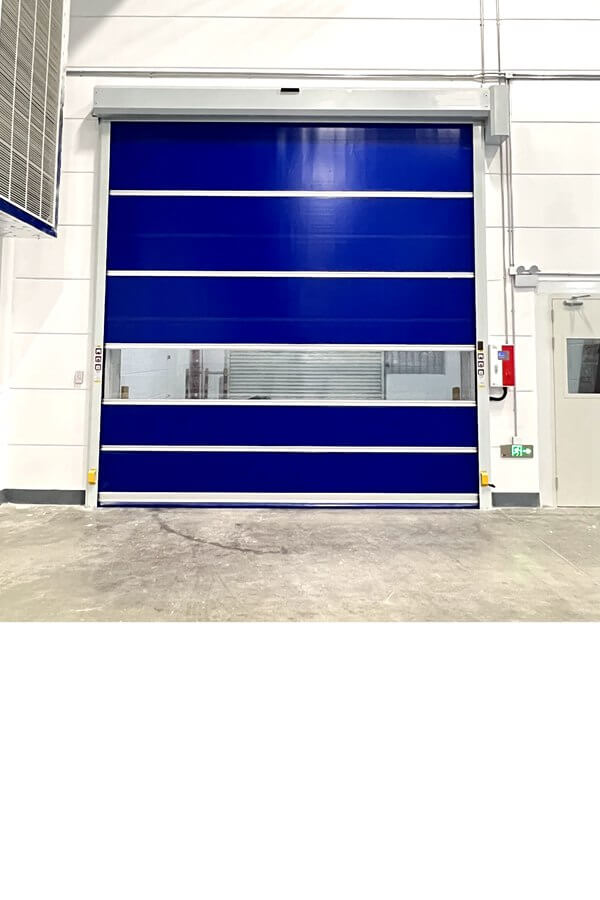
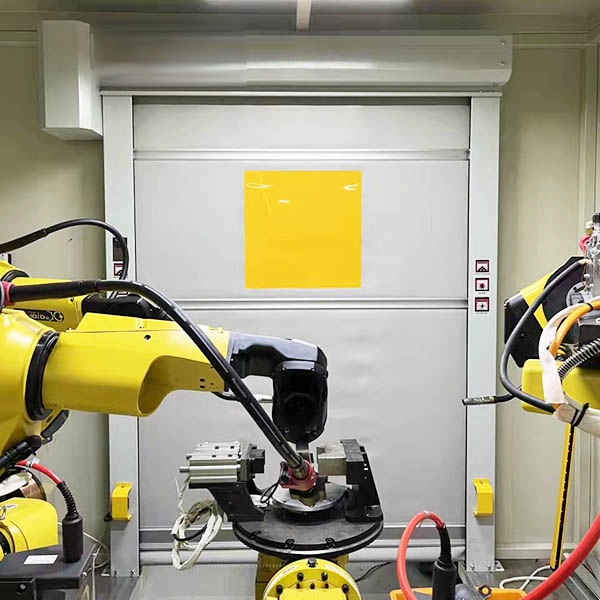
南京机器人焊接房中的快速门应用
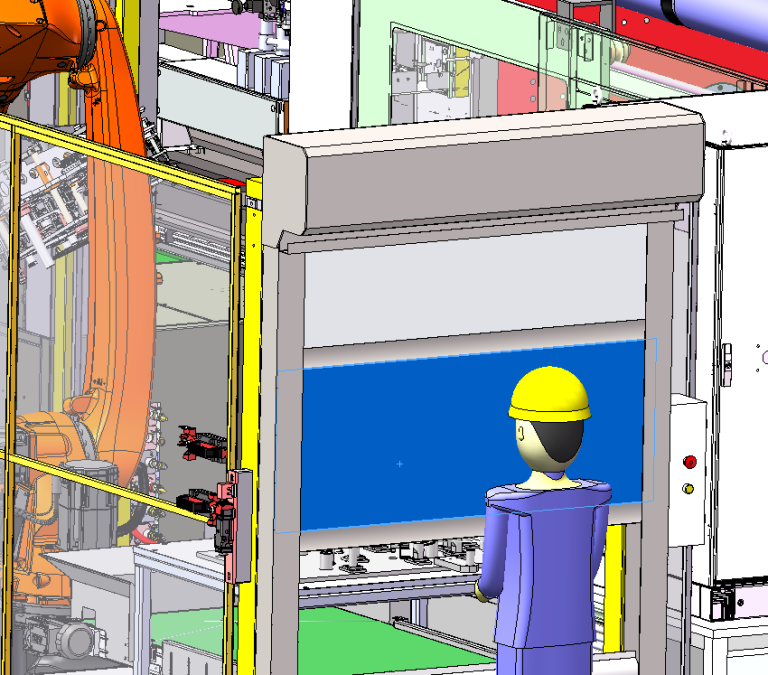
随着智能制造和工业自动化的快速发展,机器人焊接工作站已广泛应用于汽车制造、工程机…
机器人焊接房配套PVC快速卷帘门、符合出口标准
工业自动化场景中的高效防护方案:PVC快速卷帘门在焊接工作站的应用解析、随着制造…
可以做安全回路的快速门厂家

在工业自动化与物流仓储领域,快速门作为高效隔离空间、提升作业效率的关键设备,其安…
洁净房CE认证快速门

在对空气质量、温湿度和交叉污染控制要求极为严格的洁净房(如制药、生物实验室、半导…
工厂快速升降门

—— 美高门业高效工业通行解决方案 在现代工业生产与物流体系中,高效、安全、节能…
水刀房快速卷帘门

在现代精密制造领域,水刀切割技术凭借其冷切割、无热变形、适用材料广等优势,广泛应…
设备安全门(PVC快速门)

在现代工业与物流生产环境中,安全与效率并重已成为企业运营的核心理念。作为关键的安…





















友情链接: 快速卷帘门 南京快速门 硬质快速门 装卸货平台 常州快速卷帘门 电动提升门 快速卷帘门出口 设备通讯快速门 实验室光源