好品质 选美高
世界500强企业供应商

多年行业经验
提供行业咨询
多种式样可选
接受式样定制
出口多国经验
具有独立出口权
查看更多
产品中心







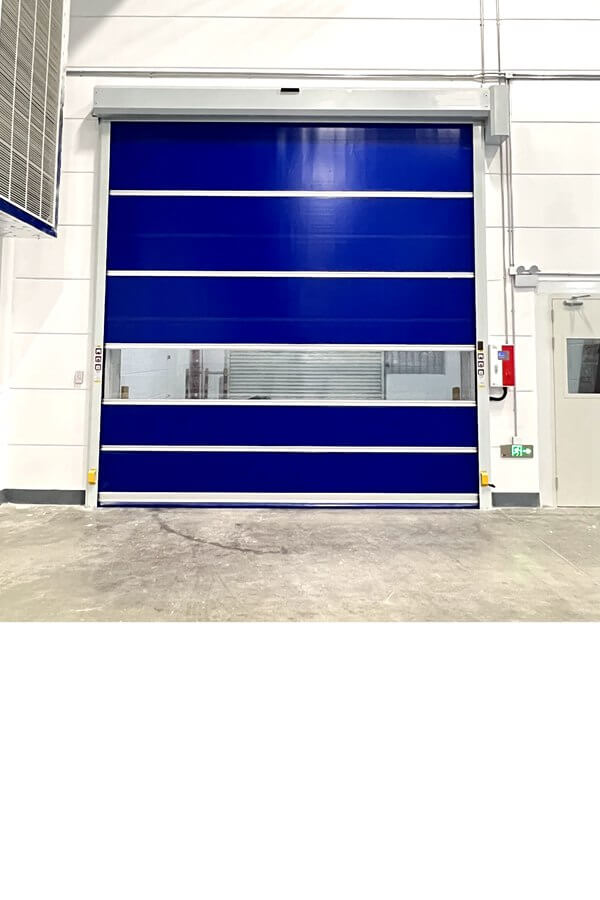
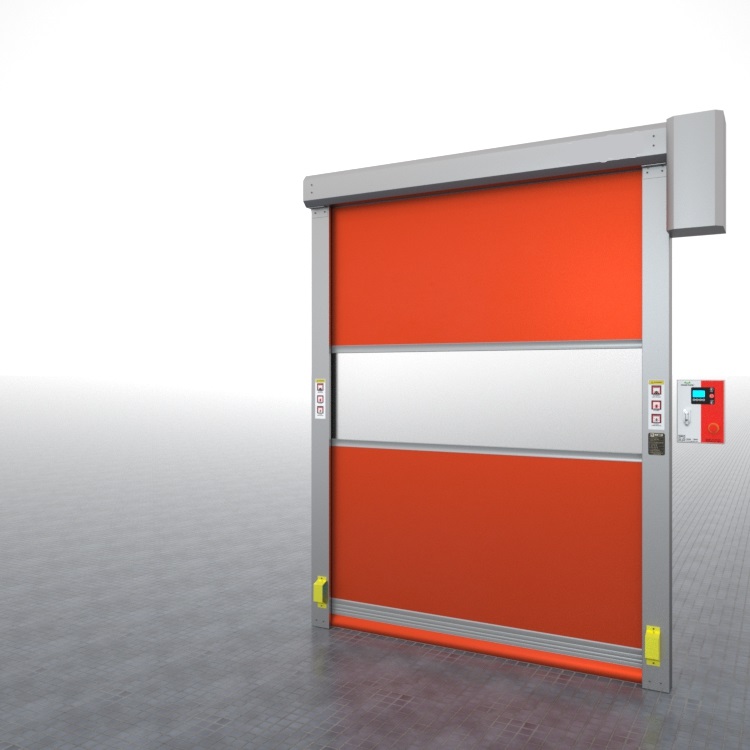
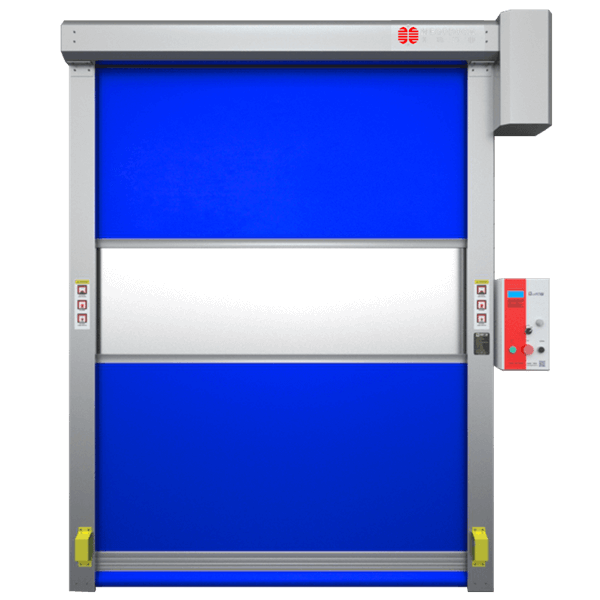
防尘、密封
快速卷帘门

抗风、保温
硬质快速卷帘门

抗风、美观
电动提升门

查看更多
新闻资讯
工厂仓库怎么防蚊虫?美高门业多层防护方案:提升门+伸缩平台+风幕机+灭蚊灯

蚊虫不仅影响仓储环境卫生,还可能传播疾…
如何选择钢制保温电动门?冷库、恒温车间等场景应用全解析

在工业建筑与高要求温控环境中,门体的选…
激光防焊渣防护快速门——工业焊接车间的安全守护者

在现代制造业尤其是焊接、激光熔接等高能…
可以出口的设备防护门

——满足国际认证的自动化产线安全解决方案 …
设备防护门
——打造自动化产线的安全屏障 在智能制造飞…
AGV小车与立体库通讯联动的快速卷帘门解决方案

随着自动化技术的发展,自动导引车(AGV)…
立体库与高架库中的快速卷帘门

随着现代物流行业的迅猛发展,仓储空间的…
防爆雷达感应快速卷帘门

在化工、石油、制药、能源等存在易燃易爆…





















友情链接: 快速卷帘门 南京快速门 硬质快速门 装卸货平台 常州快速卷帘门 电动提升门 快速卷帘门出口 设备通讯快速门 实验室光源